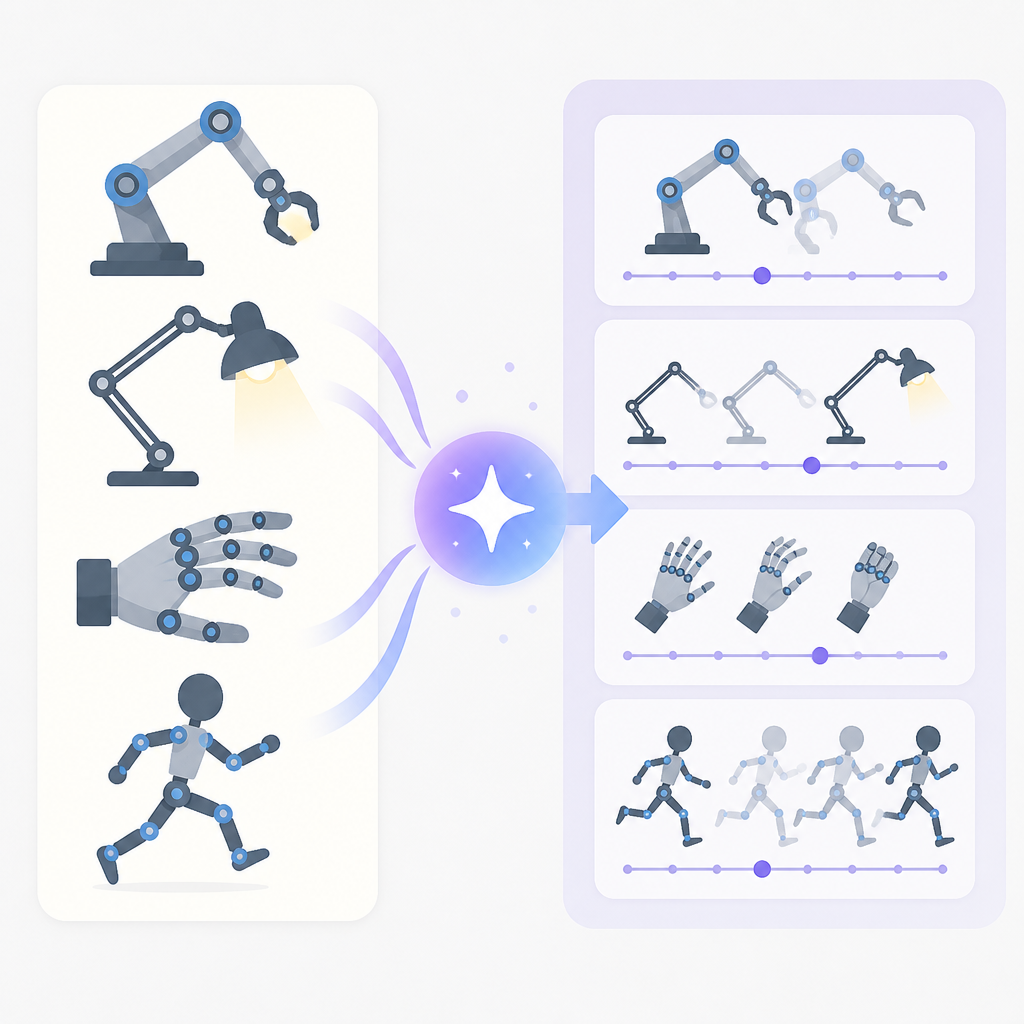
Mana turns articulated tools into animation tasks
Mana reframes dexterous tool use as animation, enabling zero-shot sim-to-real manipulation of articulated tools.

Mana reframes dexterous tool use as animation, enabling zero-shot sim-to-real manipulation of articulated tools.
- Research org: Unspecified in arXiv abstract
- Core data: <1 minute per tool
- Breakthrough: Coarse-to-fine pipeline from grasp keyframes to manipulation trajectories
Dexterous robotics has a long-running problem: once an object has moving parts, the control problem gets messy fast. A rigid mug is one thing; a tool with joints, hinges, or other internal degrees of freedom forces the robot to reason about contact, timing, and function at the same time. Mana: Dexterous Manipulation of Articulated Tools argues that this is exactly the kind of problem that benefits from a different mental model: not just grasping objects, but animating them.
The practical appeal here is straightforward. If a system can learn articulated tool use from a lightweight setup process and then transfer from simulation to the real world without extra tuning, that lowers the barrier for building robots that can do more than pick and place. For developers in robotics, the interesting part is not just the result, but the workflow: the paper tries to turn a high-friction data and policy-learning problem into something closer to a structured authoring pipeline.
What problem this paper is trying to fix
Get the latest AI news in your inbox
Weekly picks of model releases, tools, and deep dives — no spam, unsubscribe anytime.
No spam. Unsubscribe at any time.
Articulated tool manipulation is hard because the robot has to coordinate its own motion with moving parts in the tool itself. The abstract calls out two reasons this area has lagged behind rigid-object manipulation: the physical complexity of articulated tools and the challenge of learning functional grasping and manipulation policies.
That matters because many real tools are not static. If a robot can only handle rigid objects, it misses a large chunk of the tasks people actually care about. The paper positions articulated tools as a more realistic and more demanding frontier for dexterous robotics, especially when the tool’s joints and contact interactions matter to whether the task succeeds.
Prior work, according to the abstract, has focused mostly on rigid objects, leaving articulated tool use underexplored. Mana is presented as a response to that gap, with the goal of making dexterous articulated manipulation scalable rather than a one-off research demo.
How Mana works in plain English
Mana stands for Manipulation Animator, and that name is doing a lot of work. The core idea is to reinterpret dexterous manipulation as an animation problem. Instead of treating the robot’s job as a single opaque control policy, the system builds a manipulation sequence in stages, starting from coarse grasp keyframes and refining them into full trajectories.
That coarse-to-fine pipeline is the technical heart of the approach. The abstract says Mana transforms procedurally generated grasp keyframes into manipulation trajectories using motion planning and reinforcement learning. In other words, it does not jump straight from a tool description to a final policy. It first creates a structured outline of the action, then fills in the motion details.
The data generation process is also designed to be lightweight. The paper says it is largely automatic and only needs a few mouse clicks to specify functional affordances, taking less than a minute per tool. For robotics teams, that is a meaningful design choice: it suggests the system is trying to reduce the amount of manual labeling or teleoperation typically needed to build dexterous manipulation data.
Seen from a systems perspective, Mana is less about a single clever controller and more about a pipeline that tries to make the problem legible. The animation framing is useful because articulated tool use naturally has stages, key poses, and function-driven transitions. The paper’s method leans into that structure rather than forcing everything into one end-to-end black box.
What the paper actually shows
The abstract reports results across four articulated tools spanning different scales and joint types. That matters because the paper is not claiming success on only one carefully tuned object. It is trying to show that the pipeline can generalize across varied articulated tools.
The headline result is zero-shot sim-to-real transfer for both grasping and in-hand manipulation. In practical terms, that means the policies learned in simulation were able to run on real hardware without additional adaptation, at least for the cases described in the abstract. For robotics researchers, zero-shot transfer is a strong signal because sim-to-real is often where manipulation systems break down.
There are no benchmark numbers in the abstract beyond the <1 minute per tool data-generation note, so there is no reported success rate, reward score, or comparison table to cite here. That is an important limitation: the abstract gives a qualitative performance claim, but not the quantitative detail needed to judge how large the margin is over prior systems.
Even so, the result is notable because it spans two different capabilities: grasping and in-hand manipulation. Many systems can do one but not the other. The paper’s claim is that the same general framework can handle both, which suggests the animation-style decomposition may be useful beyond a narrow task setup.
Why developers and roboticists should care
If you build robotics software, the most interesting part of Mana is the workflow it implies. A system that can be configured with a small amount of manual input and then generate usable manipulation behavior in simulation could reduce the cost of prototyping new tool-use tasks.
That could matter in domains where articulated tools are common: lab automation, service robotics, or any environment where a robot may need to interact with handles, levers, hinged parts, or other moving components. The paper does not claim those applications directly, but the underlying capability is clearly relevant to them.
There is also a broader engineering lesson here. The paper suggests that some dexterous manipulation problems may benefit from being broken into authored structure plus learned refinement, rather than relying entirely on end-to-end policy learning. That is a familiar idea in graphics and animation, and Mana is trying to bring that style of thinking into robot manipulation.
What the paper does not prove yet
The abstract leaves some important questions open. It does not give benchmark numbers, ablation details, failure cases, or runtime characteristics for deployment. It also does not specify the exact four tools, so readers cannot tell from the abstract alone how broad the evaluation really is.
Another open question is how far the approach scales beyond the reported set of articulated tools. The paper presents Mana as a general sim-to-real framework, but the abstract only supports that claim for four tools and the tasks described there. As with any robotics method, the real test will be how well it handles new geometries, new joints, and messier real-world conditions.
Still, the contribution is easy to understand: Mana packages articulated tool use into a pipeline that starts with simple affordance specification, builds keyframes, and refines them into trajectories. If it holds up beyond the abstract, that is a promising direction for making dexterous manipulation less data-hungry and more reusable.
Bottom line
Mana is interesting because it treats articulated tool manipulation as a structured generation problem instead of a monolithic control problem. That shift may be especially useful for teams that want to move faster from a concept tool to a working sim-to-real policy without building a huge manual data pipeline first.
- It targets a hard robotics gap: manipulation of tools with internal moving parts.
- Its workflow is lightweight: a few mouse clicks and less than a minute per tool.
- Its reported result is zero-shot sim-to-real transfer across four articulated tools.
For developers, the big takeaway is that animation-style decomposition may be a practical way to scale dexterous manipulation. For researchers, the next question is whether this structure can survive more diverse tools, more complex scenes, and more demanding real-world conditions.
// Related Articles
- [RSCH]
Fruitfly-Inspired Regression Without Heavy Models
- [RSCH]
Mental World Modeling: Simulating minds, not just scenes
- [RSCH]
Do You Need to Pretrain Q-Functions?
- [RSCH]
OpenAI’s agent hack forces tighter eval controls
- [RSCH]
CARE routes LoRA experts by confidence
- [RSCH]
πR² makes flow policies react in real time