DanceOPD:把修圖技能蒸餾進同一模型
DanceOPD 用 on-policy 蒸餾,把文生圖與編輯能力放進同一個 flow-matching 模型,減少彼此互相干擾。

DanceOPD 用 on-policy 蒸餾,把文生圖與編輯能力放進同一個 flow-matching 模型,減少彼此互相干擾。
- 研究機構:arXiv 摘要未明確標註
- 核心數據:摘要無公開 benchmark 數字
- 突破點:路由到單一能力場
這篇論文想解的,是影像生成裡很常見、也很煩的問題:你把文生圖、局部編輯、全域編輯塞進同一個模型後,能力常常不是相加,而是互撞。DanceOPD 的主張很直接,不是再做一個更大的模型,而是改訓練方式,讓不同能力能在同一條生成軌跡裡共存。
論文標題是 DanceOPD: On-Policy Generative Field Distillation。從摘要來看,它不是在談一個單點技巧,而是在談一套蒸餾框架。核心目標是把多種影像能力,整理成同一個 flow-matching 模型可以學的「場」,而不是彼此打架的獨立任務。
這篇在修什麼痛點
訂閱 AI 趨勢週報
每週精選模型發布、工具應用與深度分析,直送信箱。不定期,不騷擾。
不會寄垃圾信,隨時可取消。
摘要先點出一個很現實的訓練失敗模式:文生圖、局部編輯、全域編輯雖然都重要,但它們不天然對齊。當你強化其中一種能力時,另一種能力可能就被拖下水。這不是小瑕疵,而是多功能影像模型最核心的整合難題。

對開發者來說,這種衝突很熟悉。單看 demo,每個功能都可能還不錯;但一旦把它們放進同一個 backbone,模型就開始顧此失彼。結果就是,你想做的是「一個模型包辦所有影像操作」,最後卻變成「一個模型,三種互相干擾的行為」。
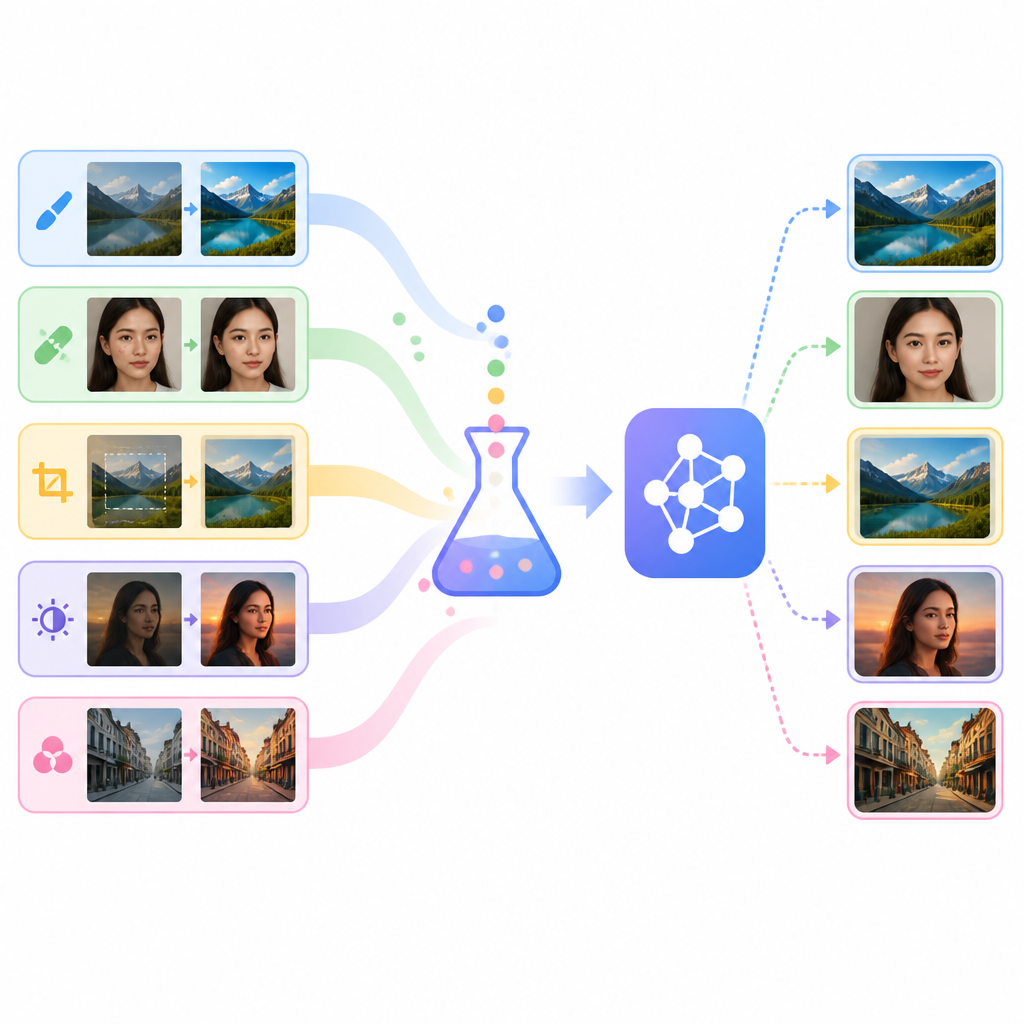
DanceOPD 的切入點,是把這些能力看成共享 flow state space 裡的不同 velocity field。白話一點,就是不把它們當成互斥的模組,而是當成同一條生成過程中的不同控制方式。這樣的想法,目標是讓能力共存,而不是讓它們輪流搶方向盤。
方法到底怎麼做
摘要把方法定義成一個 on-policy generative field distillation framework,對象是 flow-matching 模型。關鍵詞是 on-policy。它的意思不是拿一堆隨便的狀態來訓練學生,而是讓學生從自己 rollout 真的走到的狀態出發,再去對應教師的能力場。
這一點很重要。很多蒸餾問題的麻煩,不在於老師不夠強,而在於老師看到的狀態,跟學生實際會走到的狀態不一樣。DanceOPD 想縮小的,就是這個 mismatch。它讓每個樣本先被路由到某個能力場,再在低噪聲的 student-induced state 上取樣訓練,最後用簡單的 velocity MSE 目標來學。
如果用工程角度看,這像是把訓練資料的來源,從「理想路徑」改成「模型自己真的會走的路徑」。這種設計的價值,不在於把 loss 弄得更花俏,而在於讓學生學到的東西,更貼近它推理時真正會碰到的狀況。
摘要還提到,每個能力來源都被定義成 shared flow state space 裡的一個 velocity field。這代表文生圖、編輯、以及其他操作,不是各自獨立的黑盒,而是可以用同一套語言來描述。對做影像系統的人來說,這比「加一個 head、再加一個 head」更像是在建立統一的控制層。
另外,摘要也說這個 formulation 能吸收 operator-defined fields,例如 classifier-free guidance。也就是說,它不只處理摘要裡點名的幾種能力,還想把外部定義的操作場一起納入同一套蒸餾框架。這讓方法看起來比較像一個通用的 flow-matching 訓練接口,而不是只針對某個單一任務的技巧。
論文實際證明了什麼
摘要提到,作者做了涵蓋文生圖、編輯、realism-field absorption,以及 classifier-free guidance absorption 的完整實驗。這個測試面向算是有對到方法主張,因為它同時看主能力,也看框架是否真的能吸收外部操作場。
但要注意,摘要沒有公開完整 benchmark 細節。沒有分數、沒有百分比、也沒有吞吐量數字,所以這裡不能硬編結果。就摘要能支持的範圍來看,作者的結論是:這個方法能改善多能力組合,增強目標能力,並且保住 anchor generation quality。
這裡的 anchor generation quality 很關鍵。影像模型常見的問題是,當你把新能力加進去,原本最穩的基礎生成反而退步。也就是說,模型會學會修圖,卻忘了怎麼穩定生圖。DanceOPD 的主張,是它比對照方法更能避免這種「加功能、掉底盤」的狀況。
所以,這篇論文真正證明的,不是某個排行榜上的大勝,而是訓練路徑可以被重新設計,讓多種影像能力在同一模型裡比較不容易互相毀掉。對研究來說,這是方法論上的訊號;對產品來說,這是可整合性的訊號。
對開發者有什麼影響
如果你在做影像工具,這篇的價值很直白。使用者不想下載三個模型,分別處理生成、局部修補、全域改寫,還要再學一套 guidance 技巧。他們想要的是一個模型,能根據指令切換行為,而且不要一切換就崩。
DanceOPD 的方向,正是把這個整合問題搬回訓練階段處理。它不是先假設架構一定要更大,而是先處理「模型怎麼學」這件事。很多時候,真正的瓶頸不是參數不夠,而是模型在訓練時看到的狀態分佈,跟推理時的真實軌跡不一致。
這也提醒一個常被忽略的事:多能力模型的問題,可能不是某個能力單獨不夠強,而是整體訓練分佈不對。當不同能力互相干擾時,修補方式不一定是再疊更多資料,而是要讓蒸餾與路由方式更貼近模型實際生成的過程。
對 flow-matching 系統來說,這篇的訊息尤其明確。它不是提供一個通用的「任何生成模型都適用」答案,而是針對 flow-matching 架構提出一種更適合多能力組合的訓練法。如果你正在做這類系統,這種 on-policy 思路值得放進設計清單。
限制與還沒回答完的問題
先講最明顯的限制:我們目前只有摘要,沒有完整 benchmark 數字。這代表你可以判斷它的方法方向,但還不能從這份 raw 資料裡看出它到底贏多少、在哪些資料集上贏、或是哪些情境下效果最好。
第二個限制是適用範圍。摘要明確把方法放在 flow-matching models 的脈絡裡,所以它是否能直接搬到其他生成範式,來源沒有給足證據。這種訓練設計通常很吃架構前提,不能看到「蒸餾」兩個字就想當成萬用模板。
第三個是實作複雜度。摘要說 loss 很簡單,用 velocity MSE 就能訓練,但簡單的目標函數,不代表整個訓練流程就簡單。像 sample routing、能力場管理、以及低噪聲 student-induced state 的處理,都可能在實務上增加工程成本。這些細節,摘要沒有展開。
換句話說,DanceOPD 目前比較像是一個把問題重新定義好的方法:它把多能力影像生成的衝突,從「模型本身不夠強」改寫成「訓練與路由方式不對」。這種改寫很有價值,但它的實際落地成本與收益幅度,還要看完整論文與後續實作。
結論
DanceOPD 想證明的是:同一個影像模型可以同時學文生圖與編輯能力,但前提是訓練方式要改。它用 on-policy generative field distillation,把學生拉回自己真正會走的 rollout 狀態,再去對齊對應的能力場,目標是減少能力互撞。
對開發者來說,這篇的重點不是「數字有多漂亮」,因為摘要沒有公開完整 benchmark。重點是,它提供了一個很實際的方向:如果你想做統一影像模型,蒸餾怎麼做、樣本怎麼路由,可能跟架構本身一樣重要。
這類方法如果證實可行,會直接影響未來影像系統的設計方式。不是每個功能都拆成獨立模型,而是把能力當成共享生成場的一部分來管理。這正是 DanceOPD 想推的方向。