FACTR 2 讓便宜機械臂感知力道
FACTR 2 用學到的外部扭矩估計,把廉價機械臂的接觸資訊補回來,並讓示範學習更重視碰觸前後的關鍵片段。

FACTR 2 用學到的外部扭矩估計,把廉價機械臂的接觸資訊補回來,並讓示範學習更重視碰觸前後的關鍵片段。
- 研究機構:arXiv 摘要未明確標註
- 核心數據:10 分鐘 free-motion 資料、1 分鐘訓練、五個長時序任務提升超過 17%
- 突破點:無力感測估外部扭矩
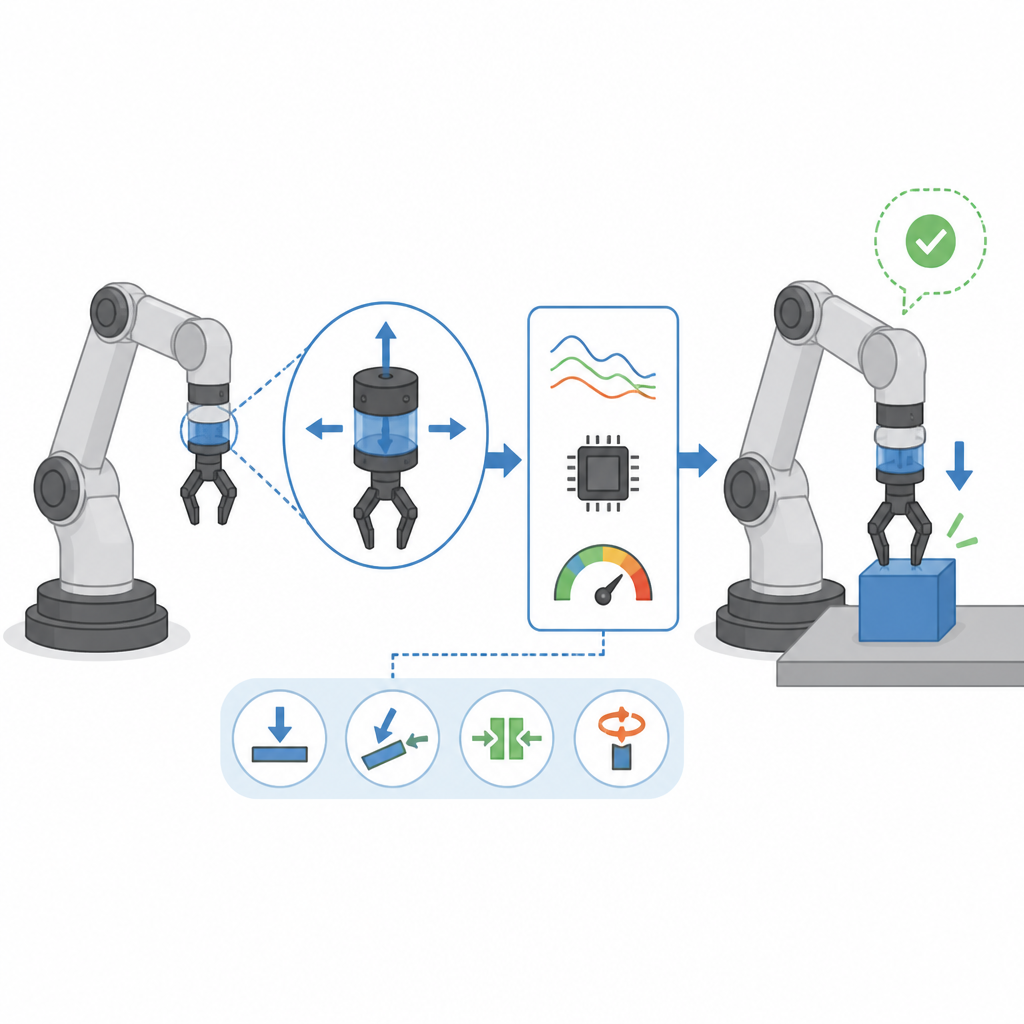
便宜機械臂不是不能做接觸任務,而是常常少了「摸得到」這一層資訊。對遠端操控、模仿學習、抓取、插入、推動這類工作來說,缺少力回饋會讓機械臂看起來動得對,實際卻差一點。FACTR 2 想解的,就是這個落差。
這篇論文的核心想法很直接:既然硬體沒有專用力感測器,那就先從運動資料裡把外部扭矩估出來,再把這些估計值拿去改善操控和學習。它不是在賣一顆新感測器,而是在證明,便宜機械臂也能透過學習補出接觸訊號。
它要解的痛點是什麼
訂閱 AI 趨勢週報
每週精選模型發布、工具應用與深度分析,直送信箱。不定期,不騷擾。
不會寄垃圾信,隨時可取消。
很多機械臂會省掉專用力感測器,原因很現實,就是成本。對實驗室、新創、或想快速擴大部署的團隊來說,這會直接影響平台選型。沒有力回饋時,機械臂很難分辨接觸前、接觸中、碰撞發生的時刻,而這些時刻往往正是操作成敗的關鍵。

問題不只在控制。對示範學習來說,沒有接觸資訊,也會讓資料裡最重要的片段被稀釋。演示看起來完整,但模型可能學不到真正決定任務成敗的那一小段碰觸動作。結果就是,政策在平移、靠近時都還行,一碰到需要精準接觸的地方就容易出錯。
所以,FACTR 2 不是單純在做 sensing。它是在處理一個更實際的工程問題:怎麼讓低成本機械臂也能支援接觸密集的學習與控制流程。
方法怎麼運作
這篇論文把方法拆成兩段。第一段叫 Neural External Torque Estimation,簡稱 NEXT。摘要把它描述成一種資料驅動的方法,不需要專用力感測器,就能估計外部關節扭矩。更關鍵的是,它只需要 10 分鐘的 free-motion 資料,而且訓練時間是 1 分鐘,代表它不是那種很重、很難塞進實際工作流的模型。
free-motion 資料的意義在於,不必先搭一套複雜的力感測環境,也不必先做很重的校正流程。機械臂先在沒有特殊接觸設置的情況下動起來,模型再從這些運動中推回外部扭矩。摘要說,這些估計結果可與專用關節扭矩感測器相比,這就是 NEXT 最重要的主張。
第二段叫 Force-Informed Re-Sampling Training,簡稱 FIRST。這是把估計到的力訊號接到 policy learning 上。它不是把所有示範畫面一視同仁,而是在 behavior cloning 裡對 pre-contact 和 contact 片段做 up-sampling。白話說,就是訓練時更常看到「快要碰到」和「已經碰到」的片段,讓模型把注意力放在最容易出錯、也最有資訊量的地方。
這兩段合起來,就是一條完整管線:先用 NEXT 在便宜機械臂上估力,再用 FIRST 把這些資訊回灌到學習流程裡。概念不複雜,但很實用,因為它不是要求你換硬體,而是把原本看不到的接觸訊號從資料裡挖出來。
論文實際證明了什麼
摘要給了三個最直接的結果。第一,NEXT 可以用 10 分鐘 free-motion 資料,在 1 分鐘內完成訓練。第二,它估出來的外部扭矩,和專用關節扭矩感測器相比是可比的。第三,它能支援低成本機械臂上的 force-feedback teleoperation,並透過 FIRST 改善 policy learning。
在政策學習這邊,摘要還提供了一個明確數字:在五個長時序任務上,FIRST 的 task progress 比先前的 force-aware policies 高出超過 17%。這是摘要裡唯一公開的 benchmark 級數字,所以目前不能從這份 raw 資料知道任務名稱、成功率、硬體型號或其他更細的評估指標。不過,就摘要能看到的範圍來說,方向很清楚:把接觸片段重新加權,確實能讓模仿學習在長時序任務上更強。
也要分清楚論文有說什麼、沒說什麼。摘要沒有宣稱 NEXT 可以在所有場景完全取代力感測器,也沒有公開完整的誤差表或對不同機械臂的泛化測試。它只說估計值「可比」,但沒有在摘要裡交代這個可比是怎麼量的。因此,從 raw 資料能做的結論是:這方法有潛力,而且看起來夠輕量,適合進入實際流程;但它的邊界還需要看全文才能判斷。
- NEXT 用無力感測資料估外部關節扭矩。
- FIRST 在 behavior cloning 中重採樣接觸片段。
- 五個長時序任務的 task progress 提升超過 17%。
對開發者和機器人團隊的意義
如果你在做 robot learning,這篇最重要的訊息是:力回饋不一定非得靠昂貴硬體才能有。很多 manipulation 系統的限制,不是演算法不夠好,而是感測器預算先把天花板封住了。FACTR 2 提供了一條路,讓 commodity robot arms 也能先有一層可用的力感知,再把它接到操控與學習管線裡。
這對工程設計有直接影響。你可能不需要在每支機械臂上都整合專用力感測器,而是可以先用運動資料估出有用的扭矩訊號,再把這些訊號餵給訓練流程。對需要快速迭代的團隊來說,這代表系統整合的複雜度有機會下降,接觸密集任務也比較容易原型化。
另一個實務上的啟發是:示範資料不是每一幀都一樣重要。真正決定 policy 成敗的,常常是接觸前後那幾段。如果模型老是卡在接觸點,那像 FIRST 這種把這些片段加權的做法,可能比一般的重取樣更有用。尤其在長時序任務裡,一個小小的接觸誤差,後面就可能一路連鎖失敗。
但限制也很明顯。摘要沒有回答 NEXT 對不同機械臂、不同速度、不同負載、或不同磨耗狀態的轉移能力。也沒有說明 FIRST 對扭矩估計噪聲有多敏感。更重要的是,17% 這個提升裡,有多少來自感測估計本身,有多少來自重採樣策略,摘要也沒拆開。對實作團隊來說,這代表它是值得關注的方向,但還不是可以直接照抄的完整配方。
怎麼看這篇工作的實際價值
如果把 FACTR 2 用一句話說完,它是在把「摸得到」這件事盡量軟體化。NEXT 從運動中抽出接觸訊號,FIRST 再用這些訊號教政策把注意力放在真正重要的地方。對想用 off-the-shelf 機械臂做 manipulation 的開發者來說,這種組合可能比換一台更貴、感測更完整的機器更實際。
這篇的更大意義,是它把力感測和接觸學習之間的門檻往下拉了。摘要顯示,這條路已經能在多個長時序任務上看到效果,但細節怎麼落地,還得看完整論文怎麼處理估計誤差、資料品質和不同硬體條件。
對現在的機器人團隊來說,這類方法的價值不只是省錢,而是讓低成本硬體也能進入更複雜的接觸任務。FACTR 2 的訊息很明確:如果你能把接觸估得夠好,便宜機械臂也能訓練出更像樣的政策。