RL Training That Hands Off Control Gradually
This paper shows how to start RL from a working baseline policy and gradually hand control to a learned policy.
This paper shows how to start RL from a working baseline policy and gradually hand control to a learned policy.
- Research org: Unspecified in arXiv abstract
- Core data: No benchmark numbers in abstract
- Breakthrough: Arbitrates between a baseline policy and a trainable policy during training
Reinforcement learning is often expensive not because the algorithms are hard to write, but because the setup is hard to make work: rewards need tuning, environments need care, and training can burn a lot of compute before anything useful emerges. This paper is aimed at a very practical pain point: what if you already have a policy that works, just not well enough?
Instead of starting from zero, the method uses that baseline as part of training itself. The interesting part is that the baseline is not just a warm start; it is an active participant that helps the agent stay on track early on, then gradually gives way to the learned policy until the final model can run on its own.
What problem this paper is trying to fix
Get the latest AI news in your inbox
Weekly picks of model releases, tools, and deep dives — no spam, unsubscribe anytime.
No spam. Unsubscribe at any time.
Classic RL training assumes you begin with little more than a random policy and a reward signal. In real control problems, that is often wasteful. Engineers may already have a controller, heuristic, or older policy that can reach the goal reliably, but it may be too weak to keep.

The paper focuses on that middle ground: a baseline policy that is functional but suboptimal. In the authors’ framing, “functional” means the agent reaches a goal set and stays there with high probability. That matters because it gives training something stable to lean on instead of forcing the learner to discover basic survival behavior from scratch.
For practitioners, this is a familiar situation. You may have a rule-based controller, a hand-tuned system, or a previous model that does the job most of the time. The question is how to turn that into a better policy without throwing away the working parts.
How the method works in plain English
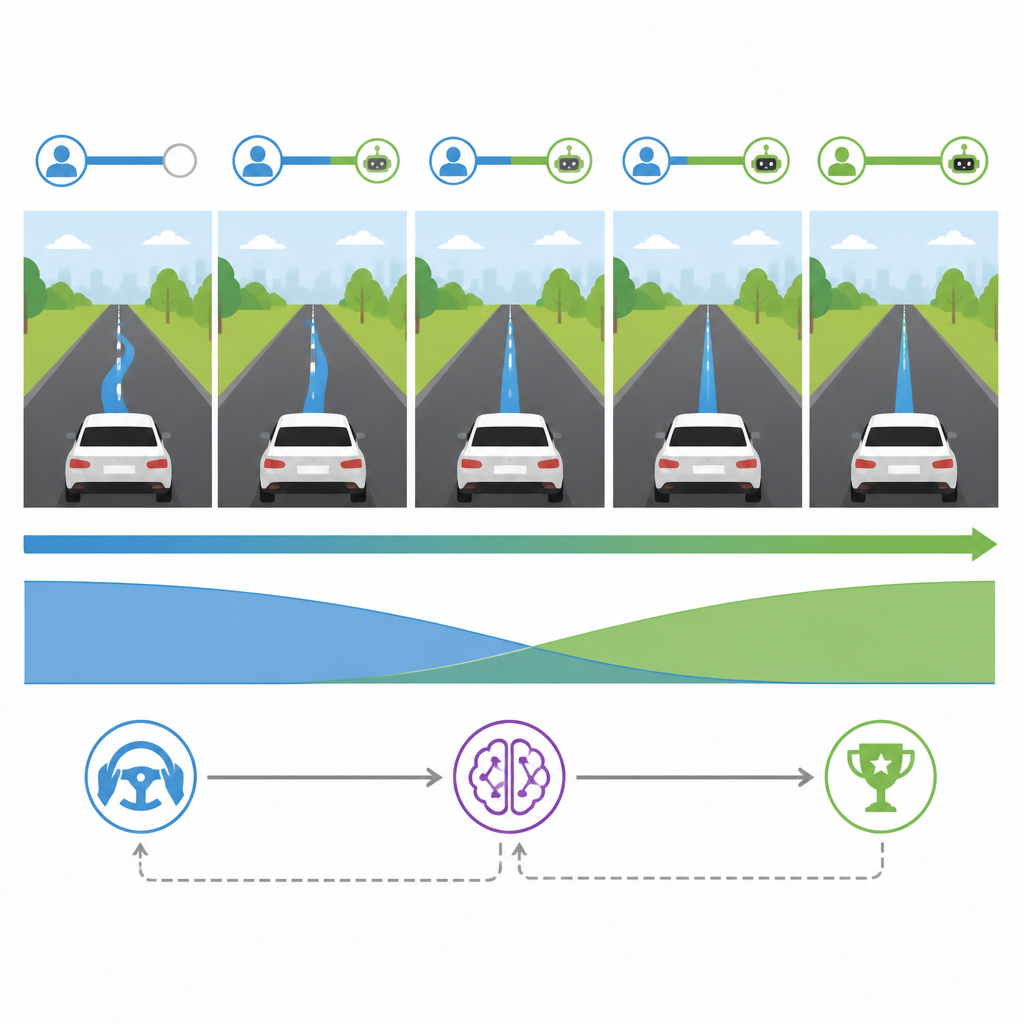
The core idea is an arbitration mechanism. At each step, the system chooses between the baseline policy and a trainable learning policy. Early in training, the baseline carries most of the load. As training progresses, control is transferred more and more toward the learned policy.
That transfer is the “agency-transferring” part of the title. The baseline is not just copied into the new model and forgotten; it acts as a scaffold. The learning policy gets to observe and improve under conditions where the agent is already likely to reach the goal, which makes the learning problem less brittle.
By the end of training, the baseline is removed entirely. The result is a standalone neural network that operates without baseline support. The paper also says the arbitration mechanism is designed to exploit the baseline’s ability to keep the agent in the goal set, which helps produce high goal-reaching rates from the start.
In other words, the method tries to combine the reliability of a good controller with the adaptability of RL. That is a useful pattern whenever you have a decent policy but still want something better, cheaper, or more flexible.
What the paper actually shows
The abstract reports two kinds of evidence: theory and experiments. On the theory side, the authors formalize what it means for the baseline policy to be functional and give a formal interpretation of the training behavior under stated assumptions. They also extend the analysis to the final baseline-free regime and derive explicit lower bounds for the standalone learned policy’s goal-reaching probability.
That theoretical piece is important because it addresses a common worry with hybrid training schemes: if the baseline is doing the heavy lifting, does the learned policy ever become genuinely competent on its own? The paper’s answer is that, under its assumptions, the final policy still has provable goal-reaching guarantees.
On the empirical side, the paper evaluates the method on continuous-control benchmarks. The abstract does not name the benchmarks or provide numeric scores, so there are no concrete benchmark numbers to quote here. What it does say is that returns match or exceed competitive approaches, and that the method maintains the highest goal-reaching rates throughout training among the compared methods, including in the final stage when the learned policy no longer has baseline support.
That last detail is the practical headline. A lot of methods look good while training is being stabilized by some external trick, but fall apart when that support disappears. This paper claims the opposite: the learned policy remains strong after the handoff.
Why developers should care
If you build RL systems for robotics, control, or any domain where “good enough” behavior already exists, this paper points to a more efficient training loop. You do not necessarily need to start from scratch, and you do not necessarily need to treat the baseline as disposable.
The method suggests a workflow where an existing controller becomes training infrastructure. That can shorten the path to a better policy, reduce the risk of catastrophic early training behavior, and make goal-reaching performance more stable while learning is still in progress.
It also gives teams a cleaner way to think about policy improvement. Rather than asking, “How do we replace the baseline immediately?”, the paper asks, “How do we transfer responsibility safely?” That framing may be especially relevant in systems where unsafe exploration is expensive or unacceptable.
What’s still missing
The abstract is promising, but it leaves out several details that matter for implementation. It does not specify the benchmark names, the size of the gains, the arbitration rule itself, or the exact assumptions behind the theoretical bounds. Those details will determine how easy the method is to reproduce and how broadly it applies.
It also does not tell us how the baseline policy is obtained, how sensitive the method is to baseline quality, or what happens when the baseline is only weakly functional. Those are the questions engineers will care about before adopting the technique in a real system.
Still, the paper’s direction is clear: if you already have a policy that can keep the agent alive and on task, this method tries to turn that into a better final policy instead of starting over. For many RL projects, that is a much more realistic path than pure from-scratch training.
Bottom line
This is a model-free RL enhancement technique built around a simple but useful idea: let a working baseline guide training, then phase it out. The paper claims that this improves training efficiency, preserves high goal-reaching rates, and produces a final policy that can stand alone.
For developers, the appeal is not just better returns. It is a more practical training strategy for problems where you already have a controller worth keeping, even if it is not the final answer.
- Uses an existing functional policy as a training scaffold
- Transfers control gradually until the learned policy runs alone
- Combines theoretical goal-reaching bounds with continuous-control experiments
// Related Articles
- [RSCH]
Prompt engineering turns codegen into a repeatable workflow
- [RSCH]
CLEAR prompts turn AI search into usable answers
- [RSCH]
Prompt engineering in 2026: the cheat sheet
- [RSCH]
GraphVid uses interaction graphs to steer video
- [RSCH]
Expanding Flow Maps let generation grow with output size
- [RSCH]
VLM-IE3D adds 3D geometry to VLMs